/ 玖物智能产品手册
# 玖物智能产品手册
# 一、公司介绍
玖物是一家全球领先的智能机器人企业。公司秉持“让制造更智能,让生活更智慧” 这一使命,专注于智能移动机器人和激光雷达的研发、制造、销售和服务,在即将开启的万物互联智能世界,立足于为工业、医疗健康行业、商业服务业提供激光雷达、控制器、驱动器、协作机械臂、移动机器人平台、机器人应用产品和整体解决方案。
公司具备强大的自主研发能力,拥有机器人核心算法和软硬件关键技术。依托生态链接、协同智能、数字孪生等技术,我们致力于有效解决行业痛点,提升生产效率,率先实现了同一场景下四百多台移动机器人协同生产的工业应用,并已成功推广至几十个工厂。
根据全球市场研究机构Interact Analysis报告,玖物的SLAM 类AMR在全球市场份额位居前三,目前移动机器人在全球部署超万台。
# 二、客户价值
- 降本增效
- 单台AMR替代1-2个人工,7x24小时全天候运作;
- 可视化数据管理帮助优化改进生产、物流流程,持续提高生产效力。
- 助力数字化转型
- 开放与兼容的系统,与MES,WMS,大数据平台等系统的无缝对接,帮助企业实现数字化生产管理。
- 可靠实施
- 行业专家团队丰富的系统集成与整合经验,帮助客户定制可靠的解决方案,保证项目实施成功。
- 投入少、回报快
- 无需设施改造即可完成部署,运维成本低,平均回本周期小于18个月,产品生命周期长,ROI持续上升。
# 三、产品介绍
# 1. 产品架构
玖物智能自主研发出具备关键核心技术的移动机器人相关控制器、驱动器及激光雷达等核心硬件以及机器人感知、规划、控制、复杂集群调度等核心软件算法,并将核心硬件与核心软件两者相结合,打造出智能移动机器人平台。通过智能移动机器人平台的二次开发,形成应用于多行业、多领域的移动机器人产品,从而进一步实现行业应用的整体解决方案。

# 2. 软件介绍
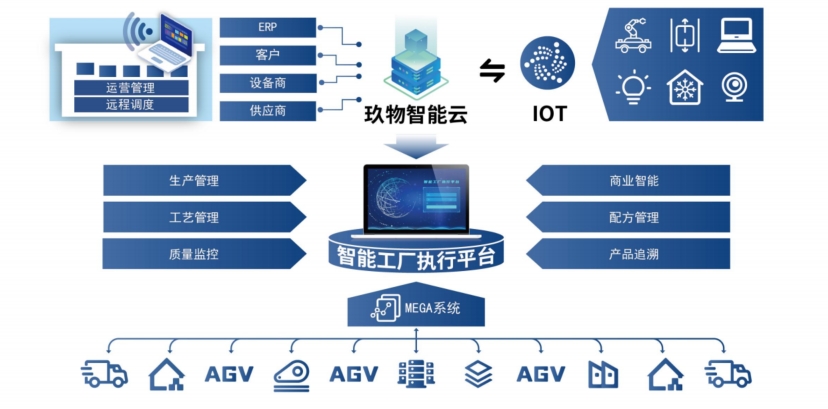
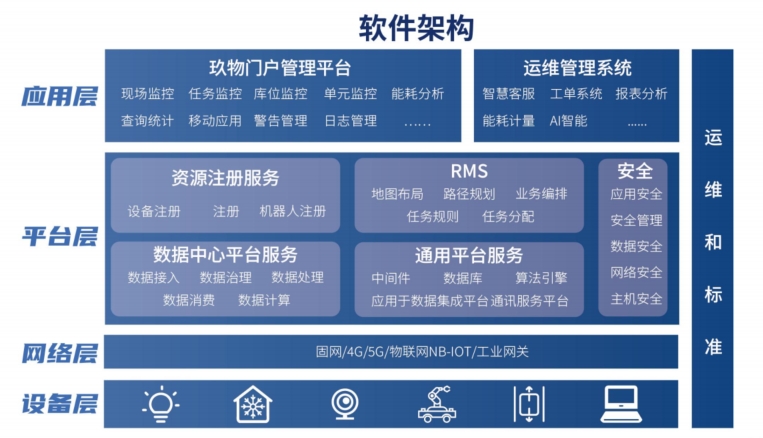
玖物智能机器人依托于“智慧云”对接业务系统,分析各类任务指令等协助管理,通过智慧工厂执行平台调度全系列移动机器人有序、协同、集群运行,满足各行业内物流智能化、数字化变革需求。
# 3. 智慧物流解决方案
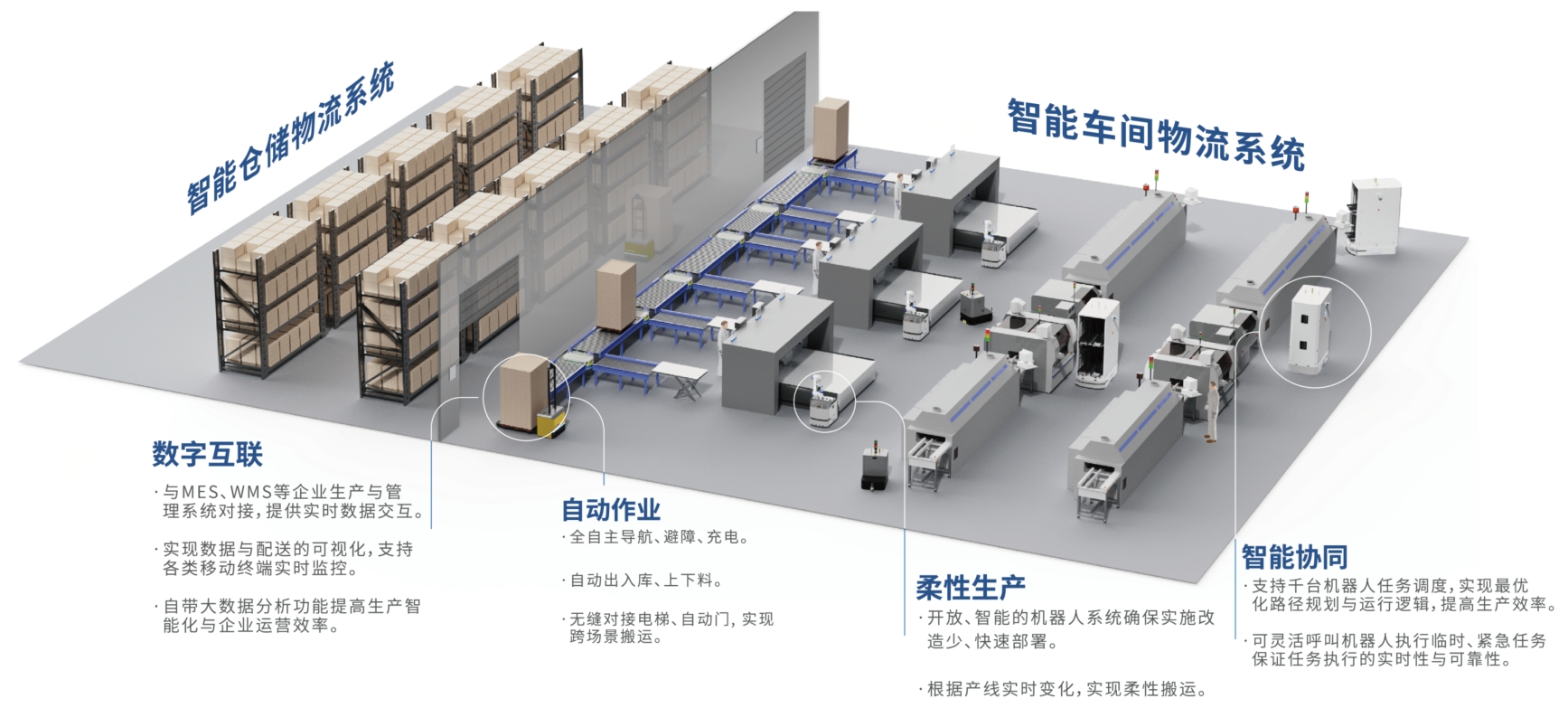
玖物作为频先的智能仓储与智能车间物流机器人解决方案供应商,具有自主研发的先进的雷达技术、驱控技术、导航算法,行业专家团队可以根据各行业工艺要求和客户痛点,选择不同的功能模块,配备机器人管理系统(Junion Manager)和机器调度管理系统(RMS),与仓储管理系统(WMS)、制造执行系练(MES)等信息系统相集成,实现智能化仓库管理,使生产更加自动化、智能化、数字化、柔性化。大大减少人工的投入,提高投资回报率并帮助客户取得显著的经济效益和社会效益。
- 数字互联
- 与MES、WMS等企业生产与管理系统对接,提供实时数据交互。
- 实现数据与配送的可视化,支持各类移动终端实时监控。
- 自带大数据分析功能提高生产智能化与企业运营效率。
- 自动作业
- 全自主导航、避障、充电。
- 自动出入库、上下料。
- 无缝对接电梯、自动门,实现跨场景搬运。
- 柔性生产
- 开放、智能的机器人系统确保实施改造少、快速部署。
- 根据产线实时变化,实现柔性搬运。
- 智能协同
- 支持千台机器人任务调度,实现最优化路径规划与运行逻辑,提高生产效率。
- 可灵活呼叫机器人执行临时、紧急任务保证任务执行的实时性与可靠性。
# 4. 移动机器人平台
# 4.1 产品优势
- 安全可靠
- 玖物机器人和充电站均已获得CE认证整机与电池及其他关键零部件都经过高强度与指标化的严苛测试。基于激光SLAM导航技术,具有激光、超声波、深度相机等多种安全保障技术
- 模块化设计
- 提供标准接口,支持各种定制化需求,满足不同场景应用
- 快速部署
- 实施、部署简单快速
- 无需对产线做任何改动
- 无需人工地标
- 自动作业
- 全自主导航、避障、充电
- 自动出入库、上下料
- 无缝对接电梯、自动门
- 开放互联
- 5G/Wifi通讯
- 实时性高
- 远程状态监控
- 智能协同
- 支持千台机器人任务调度
- 可灵活呼叫机器人执行临时、紧急任务
# 4.2 产品介绍
| 技术参数 | 参数值 | 参数值 | 参数值 | 参数值 | 参数值 | 参数值 |
|---|---|---|---|---|---|---|
| 产品型号 | Carry mini | Carry-square | Bot200Z | Bot300 | Bot600 | Bot1000 |
| 产品图示 |  |  |  |  |  |  |
| 外形尺寸 | Φ480*H300mm | 827*528*244 | 726.4*620*165mm | 789.5*566*300mm | 977*735*288mm | 1125*820*250mm |
| 自重 | 42kg | 50kg | 72kg | 149kg | 150kg | 180kg |
| 额定负载 | 60kg | 100kg | 200kg | 300kg | 600kg | 1000kg |
| 电池容量 | 24V,30 Ah | 24V,50Ah | 48V,25Ah | 48V,20Ah | 48V,30Ah*2 | 51.2V,30Ah |
| 续航时间 | 6h(额定负载) | 8h(额定负载) | 12h(额定负载) | 12h(额定负载) | 8h(额定负载) | 8h(额定负载) |
| 充电时间 | 2h | 2.5h | 2h | 1.5h | 2.5h | 1.5h |
| 最大速度 | 1.5m/s | 1.5m/s | 1m/s | 1m/s | 1.5m/s | 1m/s |
| 导航精度 | ±10mm/±2°(位置/角度误差) | ±10mm/±2°(位置/角度误差) | ±10mm/±2°(位置/角度误差) | ±10mm/±2°(位置/角度误差) | ±10mm/±2°(位置/角度误差) | ±10mm/±2°(位置/角度误差) |
| 对接精度 | ±5mm/±1°(位置/角度误差) | ±5mm/±1°(位置/角度误差) | ±5mm/±1°(位置/角度误差) | ±5mm/±1°(位置/角度误差) | ±5mm/±1°(位置/角度误差) | ±5mm/±1°(位置/角度误差) |
| 爬坡角度 | 9° | 5° | 5° | 5° | 5° | 5° |
| 产品亮点 | 上层可拓展性强 圆形模型-更好的通过性 爬坡能力强,爬坡角度9° 低噪音运行 原地零半径旋转 | 速度更快,稳定行进 通过性强,适合狭窄通道 上层可扩展性强 反应灵敏,灵活避障 | SMT车间各尺寸MGZ的有序周转 电子行业的多点物料搬运 260mm超低对接平台 支持反光板/磁条/色带高精度对接 杠杆式驱动轮,200kg负载运行稳固 高颜值,低噪音,长续航 搭载辑筒/同步带等可实现前后双向、双侧向对接传输 原地零旋转半径 | 工厂中型货物运输/自主搬运 杠杆式驱动轮,300kg负载运行稳固 自带顶升旋转机构 支持反光板/色带高精度对接 高颜值,低噪音,长续航 搭载料车/托盘/牵引机构/机械臂等实现物料的自动运输取放 原地零旋转半径 | 针对料车/料架/托盘等定制的大负载底盘 自带顶升旋转机构 支持反光板/色带高精度对接 杠杆式驱动轮,600kg负载运行稳固 搭载料车/托盘/牵引机构/机械臂等实现物料的自动运输取放 原地零旋转半径 | 满足产线柔性化搬运需求 前近地端配机械式保险杠 仓库的调运无人化/高效化 驱动轮采用弹簧悬挂,经济实用 原地零旋转半径 搭载银筒/同步带等可实现前后双向双侧向对接传输 重负载物流搬运 |
# 5. 高精度自主研发激光雷达
# 5.1 产品优势
- 高质量点云
- 远距离高精度探测
- 近距离反光板精准对接
- 高可靠保证
- 可靠性试验多达十数项
- 适配多种非常规应用场景
- AI算法补偿
- 多源误差AI算法补偿
- 数据稳定,不惧环境变化
- 大数据分析系统
- 自主研发多种寿命预测模型
- 全方位考察产品性能及寿命指标
- 产品一致可靠
- 定制化检测治具
- 高标准检测方法
- 专注于AGV应用场景
- 自主研发抗激光干扰技术,支持多台雷达同平面安装使用
- 支持AGV在各种应用场景下快速稳定的精准建图
# 5.2 产品介绍
| 技术参数 | 参数值 | 参数值 | 参数值 | 参数值 | 参数值 |
|---|---|---|---|---|---|
| 产品型号 | M04A | M04B | M30C | M30D | M30D mini |
| 产品图示 |  | 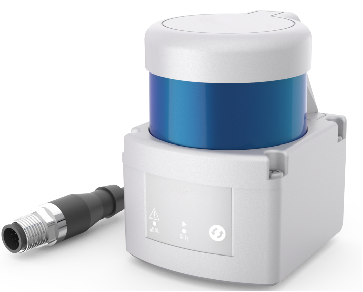 |  |  |  |
| 量程 | 不小于4m@15%反射率 | 不小于4m@15%反射率 | 不小于30m@15%反射率 | 不小于30m@15%反射率 | 不小于20m@15%反射率,50m@90%反射率 |
| 电源 | DC 9V~28V | DC 9V~28V | DC9V~28V | DC9V~28V | |
| 功率 | <2W | <2W | <5W | <5W | |
| 连接接口 | 1*带12针M12插头接口 | 1*带12针M12插头接口 | 1*带12针M12插头接口 | 1*12针M12电源和10信号 接口1*6针M12以太网接口 | |
| 光源 | 905nm | 905nm | 905nm | 905nm | 905nm |
| 激光等级 | Class Ⅰ (IEC60825-1:2014,EN 60825-1:2014) | Class Ⅰ (IEC60825-1:2014,EN 60825-1:2014) | Class Ⅰ (IEC 60825-1:2014,EN 60825-1:2014) | Class Ⅰ (IEC 60825-1:2014,EN 60825-1:2014) | Class Ⅰ (IEC 60825-1:2014,EN 60825-1:2014) |
| 扫描角度 | 270° | 270° | 270° | 270° | 270° |
| 扫描频率 | 15Hz | 15Hz | 15Hz/25Hz/30Hz,默认15Hz | 15Hz/25Hz/30Hz,默认15Hz | 10Hz/15Hz/20Hz/25Hz/30Hz,默认15Hz |
| 测量精度 | ±4cm | ±4cm | ±2.5cm | ±2.5cm | ±2.5cm |
| 通信接口 | - | RS-232(115200/230400/460800) | Ethernet(TCP/IP) | Ethernet(TCP/IP) | Ethernet(TCP/IP) |
| 角分辨率 | 1°/0.5° | 1°/0.5° | 0.33°/0.25° | 0.33°/0.25° | 0.33° |
| 数据内容 | - | 距离、角度 | 距离、角度、反射强度 | 距离、角度、反射强度 | 距离、角度、反射强度 |
| IO信号输出 | √ | - | - | √ | √ |
| 配置接口 | USB Type-C | - | - | 网口 | 网口 |
| 区域组 | 16通道*3区域 | - | - | 16通道*3区域 | 8通道*3区域 |
| 开关量 | 4路输入,3路输出+1路状态输出 | - | - | 4路输入,3路输出+1路状态输出 | 3路输入,3路输出 |
| 区域形状 | 多边形 | - | - | 多边形 | 多边形 |
| 外形尺寸 | 58*63*78mm | 58*63*78mm | 100*100*117mm | 100*100*117mm | 65*65*81mm |
| 重量 | 约290g | 约290g | 约620g | 约690g | 约300g |
| 抗环境光 | 50,000lx | 50,000lx | 50,000lx | 50,000lx | 80,000lx |
| 电磁兼容 | 发射辐射:住宅区(EN 61000-6-3:2007-01+AMD:A1:2011) 电磁兼容性:工业环境(EN61000-6-1:2007) | 发射辐射:住宅区(EN 61000-6-3:2007-01+AMD:A1:2011) 电磁兼容性:工业环境(EN61000-6-1:2007) | 发射辐射:住宅区(EN 61000-6-3:2007-01+AMD:A1:2011) 电磁兼容性:工业环境(EN61000-6-1:2007) | 发射辐射:住宅区(EN 61000-6-3:2007-01+AMD:A1:2011) 电磁兼容性:工业环境(EN61000-6-1:2007) | 发射辐射:住宅区(EN 61000-6-4:2007-01+AMD:A1:2011) 电磁兼容性:工业环境(EN61000-6-2:2005) |
| 工作温度 | -10℃~60℃ | -10℃~60℃ | -10℃~60℃ | -10℃~60℃ | -20℃~60℃ |
| 防护等级 | P20/IP65 | P20/IP65 | IP65 | IP65 | IP65 |
| 认证 | CE | CE | CE | CE | CE |
| 产品可靠性 | 抗振性 正弦共振扫描:10 Hz ...1,000 HZ(LEC 60068-2-6:2007) 正弦测试:10 Hz...500 Hz:5 g:10 个频率周期(IEC 60068-2-6:2007) 噪声测试:10...250 Hz;4.24 grms,5 h(lEC 60068-2-64:2008) 抗冲击性 50 g;11ms;6 次冲击/轴; 25 g;6 ms;2000 次冲击/轴 50 g;3 ms;10000 次冲击/轴 (IEC60068-2-27:2008) | 抗振性 正弦共振扫描:10 Hz ...1,000 HZ(LEC 60068-2-6:2007) 正弦测试:10 Hz...500 Hz:5 g:10 个频率周期(IEC 60068-2-6:2007) 噪声测试:10...250 Hz;4.24 grms,5 h(lEC 60068-2-64:2008) 抗冲击性 50 g;11ms;6 次冲击/轴; 25 g;6 ms;2000 次冲击/轴 50 g;3 ms;10000 次冲击/轴 | 抗振性 正弦共振扫描:10 Hz ...1,000 HZ(LEC 60068-2-6:2007) 正弦测试:10 Hz...500 Hz:5 g:10 个频率周期(IEC 60068-2-6:2007) 噪声测试:10...250 Hz;4.24 grms,5 h(lEC 60068-2-64:2008) 抗冲击性 50 g;11ms;6 次冲击/轴; 25 g;6 ms;2000 次冲击/轴 50 g;3 ms;10000 次冲击/轴 (IEC60068-2-27:2008) | 抗振性 正弦共振扫描:10 Hz ...1,000 HZ(LEC 60068-2-6:2007) 正弦测试:10 Hz...500 Hz:5 g:10 个频率周期(IEC 60068-2-6:2007) 噪声测试:10...250 Hz;4.24 grms,5 h(lEC 60068-2-64:2008) 抗冲击性 50 g;11ms;6 次冲击/轴; 25 g;6 ms;2000 次冲击/轴 50 g;3 ms;10000 次冲击/轴 (IEC60068-2-27:2008) | 抗振性 正弦共振扫描:10 Hz ...1,000 HZ(LEC 60068-2-6:2007) 正弦测试:10 Hz...500 Hz:5 g:10 个频率周期(IEC 60068-2-6:2007) 噪声测试:10...250 Hz;4.24 grms,5 h(lEC 60068-2-64:2008) 抗冲击性 50 g;11ms;6 次冲击/轴; 25 g;6 ms;2000 次冲击/轴 50 g;3 ms;10000 次冲击/轴 (IEC60068-2-27:2008) |
# 6. 智能叉车
# 6.1 产品优势
- 工业车辆无人驾驶控制算法
- 兼容多种导航模式支持多种品牌车辆
- 适配多种类型车辆
- 安全系统
- 安全PLC,安全激光扫描仪符合安全等级3
- 全方位360°安全防护
- 符合CE、CR、CSA标准(选项)
- 车辆运动控制系统
- 采用世界级领先思路,以软代硬,将车辆导航控制、运动控制及定位系统集成于一个工业级PC端
- 复合车辆调度系统(欧洲标准VDA5050)
- 灵活性独立性
- 多接口
- 可视化
- 兼容性
- 定制化
# 6.2 产品介绍
| 技术参数 | 参数值 | 参数值 | 参数值 |
|---|---|---|---|
| 产品型号 | POWER-P1500 | POWER-P3000 | POWER-A1500 |
| 产品图示 |  | 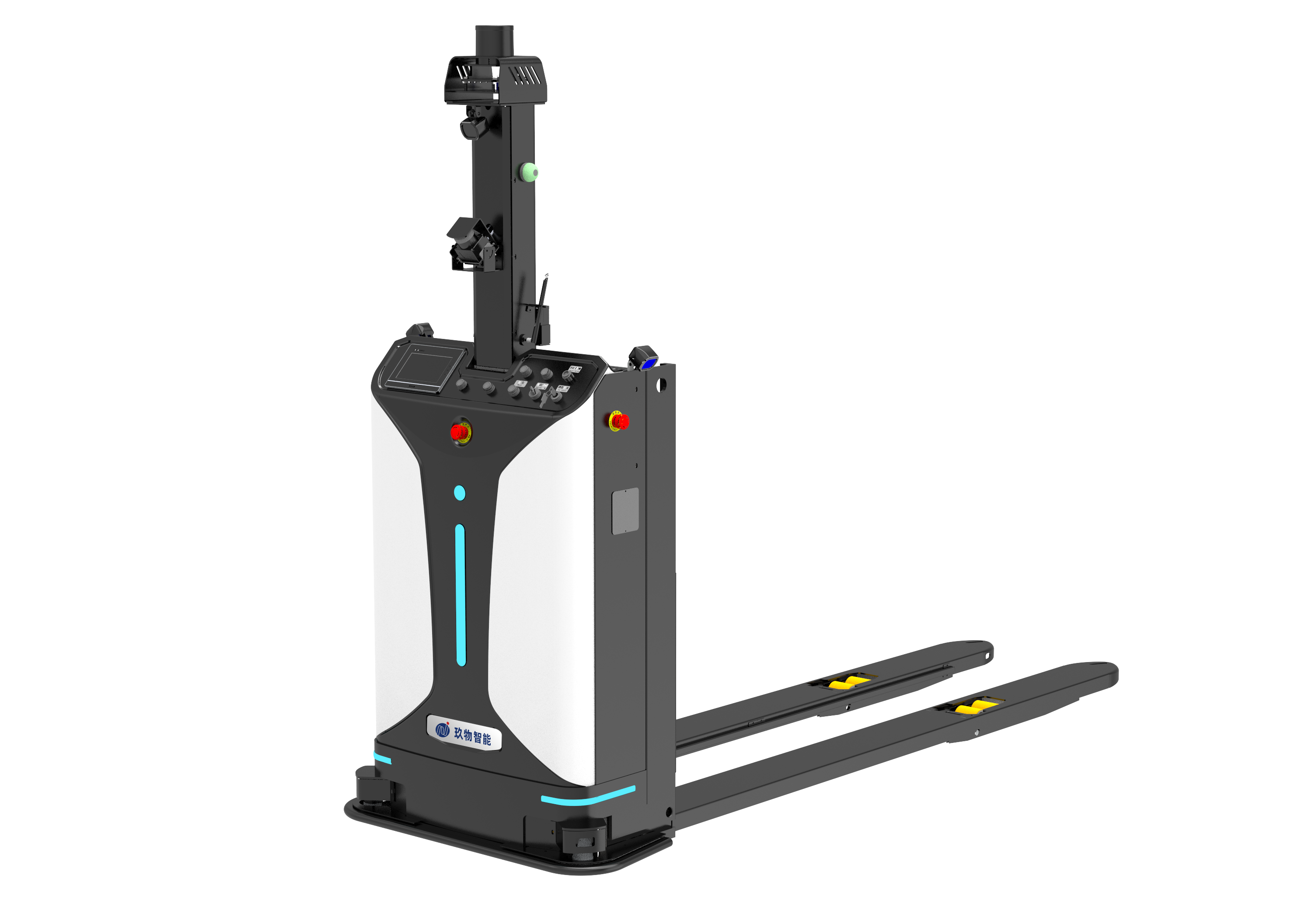 |  |
| 额定负载 | 1500 (kg) | 3000 (kg) | 1500(kg) |
| 载荷中心距 | 600(mm) | 1200 (mm) | 600 (mm) |
| 提升高度 | 200(mm) | 200(mm) | 1600(mm) |
| 货叉外宽 | 680(mm) | 680(mm) | 570/680(mm) |
| 最小转弯半径 | 1412(mm) | 2137 (mm) | 1182(mm) |
| 直角堆垛通道宽度 | 2004±200(mm) | 3050(mm) | 2087(mm) |
| 最小离地距离 | 75(mm) | 75 (mm) | 85(mm) |
| 车体尺寸 长/宽/高 | 1638/982/2200(mm) | 1516/790/1860(mm) | 1640/990/2043(mm) |
| 货叉尺寸 长/宽/高 | 60/180/1150(mm) | 55/195/2420(mm) | 1150/180/55(mm) |
| 最大爬坡能力 | 3/5(%) | 6/8 (%) | 5 (%) |
| 行驶速度 | 5/6(km/h) | 6/6(km/h) | 4/5(km/h) |
| 导航雷达 | 激光SLAM | 激光SLAM | 激光SLAM |
| 定位精度 | ±10 (mm) | ±10 (mm) | ±10 (mm) |
| 安全距离 | 5(m) | 5(m) | 5(m) |
| 电池容量 | 24V/125Ah | 24V/210Ah | 24V/180Ah |
| 通讯模块 | 无线WiFi2.4G/5.8G | 无线WiFi2.4G/5.8G | 无线WiFi2.4G/5.8G |
| 产品特点 | SLAM激光导航 激光防撞 自动充电 平面搬运 | SLAM激光导航 激光防撞 平面搬运 单机版 | SLAM激光导航 激光防撞 自动充电 堆垛搬运 |
# 7. 商用机器人
# 7.1 产品优势
- 商业专用底盘
- 底盘平台内置Junion自主研发的导航定位core,搭载Junion 30米激光雷达加深度相机,机身小巧灵动,全新悬挂,对紧凑复杂环境的适应能力强
- 模块化组件设计
- 整机采用模块化设计,便于拆卸组合,更易于满足不用客户需求
- 应用丰富
- 目前具有酒店机器人,引导讲解机器人,巡检机器人,消毒机器人,医疗配送机器人等多种商用类型,可供选择类型丰富
- 玖物云平台
- 玖物云平台为玖物商用机器人提供强大及时的云端智能服务支撑,具体功能包括:机器人运行数据采集,自动化运维,云端智能服务
# 7.2 产品介绍
| 技术参数 | 参数值 | 参数值 | 参数值 | 参数值 |
|---|---|---|---|---|
| 产品型号 | 机房巡检机器人 | 过流式消毒机器人 | 医疗搬运机器人 | 酒店机器人 |
| 产品图示 |  |  |  |  |
| 外形尺寸 | 684*536*1267mm | Φ600*1516mm | 760*450*1146mm | 890*660*304mm |
| 最小旋转直径 | 880mm(原地旋转) | 600mm(原地旋转) | 880mm(原地旋转) | 480mm(原地旋转) |
| 自重 | 68kg | 80kg | 68kg | 50kg |
| 电池容量 | 24V,60Ah | 24V,90Ah | 24V,50Ah | 24V,30Ah |
| 续航时间 | 4h(额定负载) | 2h(额定负载) | 8h(额定负载) | 8h(额定负载) |
| 充电时间 | 2h | 2.5h | 2.5h | 3.5h |
| 最大速座 | 1.2m/s | 1m/s | 1.5m/s | 1.2m/s |
| 导航精度 | ±20mm/±2°(位置/角度误差) | ±20mm/±2°(位置/角度误差) | ±20mm/±2°(位置/角度误差) | ±20mm/±2°(位置/角度误差) |
| 对接精度 | ±5mm/±1°(位置/角度误差) | ±5mm/±1°(位置/角度误差) | ±5mm/±1°(位置/角度误差) | ±5mm/±1°(位置/角度误差) |
| 爬坡角度 | 5° | 5° | 5° | 5° |
| 产品亮点 | 远程监控 多维度监测 智能引导 多方会议 全方面故障灯识别 | 内置灯管 大功率风机 人机共存 高效消杀 | 人脸识别 指纹识别 磁力牵引 | 梯控联动 超大运输舱 人机交互 |
# 8. 行业定制专用机器人
# 8.1 产品优势
- 数字互联
- 与MES、WMS等企业生产与管理系统对接,提供实时数据交互
- 实现数据与配送的可视化,支持各类移动终端实时监控
- 自带大数据分析功能提高生产智能化与企业运营效率
- 柔性生产
- 开放、智能的机器人系统确保实施改造少、快速部署。
- 根据产线实时变化,实现柔性搬运。
- 自动作业
- 全自主导航、避障、充电
- 自动出入库、上下料。
- 无缝对接电梯、自动门,实现跨场景搬运
- 智能协同
- 支持千台机器人任务调度,实现最优化路径规划与运行逻辑,提高生产效率
- 可灵活呼叫机器人执行临时、紧急任务保证任务执行的实时性与可靠性。
# 8.2 锂电行业 - 极卷双举升机器人
# 8.2.1 产品介绍
- 基于新一代全向移动平台打造的换卷机器人;
- 1.5t超高负载,1700超长筒宽,配置高精度叉臂调节模块,可适应更多尺寸,更多高度以及偏心上料等特殊要求;
- 配置360°全向激光,确保行车安全;
- 采用双叉臂设计,全自动对接换料,实现“取空补满取满上新”一趟完成,确保高精度,高效率,最大程度节约设备换料时间;
- 可应用于锂电涂布、压、模切等工序,通过对接WMS、MES实现全自动化设备对接无人化物料搬运的生产物流过程。
# 8.2.2 产品图示

# 8.2.3 技术参数
| 技术参数 | 参数值 |
|---|---|
| 尺寸 | 1880*1550*1450 |
| 料卷尺寸 | Φ900 |
| 卷筒尺寸 | 1200-1700/600*800 |
| 举升行程 | 1450-1860 |
| 自重 | 1300kg/1100kg |
| 额定负载 | 1500kg/600kg |
| 最大速度 | 1m/s(空载) |
| 额定速度 | 0.5m/s(满载) |
| 重复定位精度 | ±5mm/±1° |
| 日工作时间 | 12hrs |
| 充电时间 | 2hrs |
| 爬坡角度 | ≥3° |
| 电池容量 | 48V,100AH |
| 导航方式 | 激光SLAM |
# 8.3 半导体行业 - 圆晶搬运机器人
# 8.3.1 产品介绍
复合机器人是基于Junion移动平台Bot300搭建的复核机器人,搭载UR10E或者同级别的协作机械臂,可实现8.8kg(满料)的foup盒搬运。机器人布置双侧向雷达,可以避障,车前端具有深度相机,可以实现深坑检测。定制车轮,满足半导体厂区 ESD 需求。
# 8.3.2 产品图示

# 8.3.3 上层模块
| 模块 | 说明 |
|---|---|
| ESD | 导电阻值在1.0E5-1.0E9 以内,摩擦电压小于100v |
| 协作型机械臂 | 6轴协作机械臂,有效负载 12.5kg,臂展130mm,重复定位精度±0.03mm |
| 视觉相机 | 智能相机,实现复合机器人工具末端重复精度小于0.5mm |
| 状态显示 | 10寸触摸显示屏,实时显示机器人允许状态。 |
| 安全防护 | 碰撞条,后向声呐,前向深度相机。 |
# 8.3.4 技术参数
| 技术参数 | 参数值 |
|---|---|
| 尺寸 | 860*614*1500 |
| 材质 | 合金框架,金属外壳 |
| 自重 | 350kg |
| 额定速度 | 1.2m/s |
| 重复定位精度 | ±5mm/±1° |
| 续航 | 6H |
| 充电时间 | ≤2h |
| 爬坡角度 | ≤5° |
| 电池容量 | 48V,60AH |
| 导航方式 | 激光SLAM |
| 槽位(数量) | 2/4个 |
| 协作臂抓取负载 | 5/20kg |
| 抓取成功率 | 100% |
| 日工作时间 | 12hrs |
# 8.4 光伏电池片 - 花篮搬运机器人
# 8.4.1 产品介绍
- 标准化载物台设计,匹配光伏车间的自动化,实现车间24h无人化不间断搬运,完全取代电池车间的搬运人力
- 配置3D安全防护,复杂环境下的安全防护
- 光伏电池车间从发料间到包装线的全流程IGV搬运,实现单个车间500+IGV同时调度管控
- 落地项目50+,累计出货量9000+
# 8.4.2 产品图示

# 8.4.3 技术参数
| 技术参数 | 参数值 |
|---|---|
| 尺寸 | 1560*920*2300 |
| 下层输送带距地高度 | 450±1.5mm |
| 上层输送带距地高度 | 可定制 |
| 同层传送带之间距离 | 可定制 |
| 自重 | 230kg |
| 运输量 | 12花篮 120pcs/cst |
| 最大速度 | 1.2m/s(满载时) |
| 额定速度 | 1m/s(满载时) |
| 重复定位精度 | ±2mm/±1deg |
| 最小旋转半径 | 0mm |
| 爬坡角度 | ≥5° |
| 导航方式 | 激光SLAM |
# 8.5 光伏组件 - 组件搬运机器人
# 8.5.1 产品介绍
- 3000KG的超高负载,定制的加长货叉,适用于光伏组件场景的玻璃搬运以及组件成品搬运
- 配置3D激光与立面激光,可实现360的安全避障
- 搭配深度相机识别技术,提高叉取托盘的准确度
- 与自动上玻机、分档机、自动包装线对接,可实现产线自动叫料
# 8.5.2 产品图示

# 8.5.3 技术参数
| 技术参数 | 参数值 |
|---|---|
| 额定负载 | 3000 |
| 载荷中心距 | 600 |
| 提升高度(mm) | 205 |
| 货叉外宽(mm) | 570/680 |
| 最小转弯半径 | 1950 |
| 直角堆垛通道宽度 | 2680 |
| 最小离地距离 | 30 |
| 车体尺寸 长/宽/高 | 2175/1000/1630 |
| 最大爬坡能力 | 10/5 |
| 行驶速度 | 1.5/1.0 |
| 导航雷达 | 激光SLAM |
| 定位精度 | ±10mm |
| 安全距离 | 5m |
| 电池容量 | 24V/300Ah |
| 通讯模块 | 无线WiFi2.4G/5.8G |
| 货叉尺寸 长/宽/高 | 1150/200/75 |
# 8.6 光伏行业 - 晶棒硅料搬运机器人
# 8.6.1 产品介绍
- 解决大尺寸,长距离,重负载晶棒搬运搭载料车识别及物料条码识别功能,极大的减少现场工序人工参与环节
- 多机器人管理服务器实现多机器人的路径规划和任务协同
- 无需提前铺设任何人工标识,现场部署快捷
- 全自主导航、自主充电,动静态障碍物自主避障
- 远程状态、任务、电量等实时监控
- 行业定制专用机器人
# 8.6.2 产品图示


# 8.6.3 技术参数
| 技术参数 | 参数值 |
|---|---|
| 尺寸 | 1300*650*380 |
| 自重 | 200KG |
| 离地间隙 | 35mm |
| 最小转弯半径 | 0 |
| 额定负载 | 300KG |
| 旋转半径 | 750mm |
| 爬坡角度 | 3° |
| 制动方式 | 电磁制动 |
| 额定速度 | 1.18m/s |
| 重复定位精度 | ±5mm/±1° |
| 续航 | 12h |
| 充电时间 | 2h |
| 电池容量 | 48V60AH |
| 导航方式 | 激光SLAM |